petgraph简明教程

1. 简介
![]()
Rust中用于图数据结构处理的库,可以处理与图数据结构相关的各种算法。支持无/有向图、稳定图、带权图等。值得一提的是,Petgraph支持树,但是并没有单独设计树的数据结构。
2. 图的类型和简例
2.1 Graph通用图
图的基础结构体,其他部分结构体由Graph派生。Graph背后的内存模型是邻接表,其对节点和边的类型无任何限制。
其定义为:
1 | pub struct Graph<N, E, Ty = Directed, Ix = DefaultIx> { |
节点关联数据
N和边关联数据E,称为权重。关联数据可以是任意类型。
边类型
Ty,用于确定图边是有向图还是无向图。其中Directed为有向图,Undirected为无向图。
Ix为索引类型,默认u32。
创建一个通用无向图:
1 | let mut graph: Graph<&str, i32, Undirected> = Graph::new_undirected(); |
添加一些示范节点:
1 | // 添加12个节点 |
在图中添加一些分支:
1 | // 定义边的连接信息和权重 |
其结果如下图所示: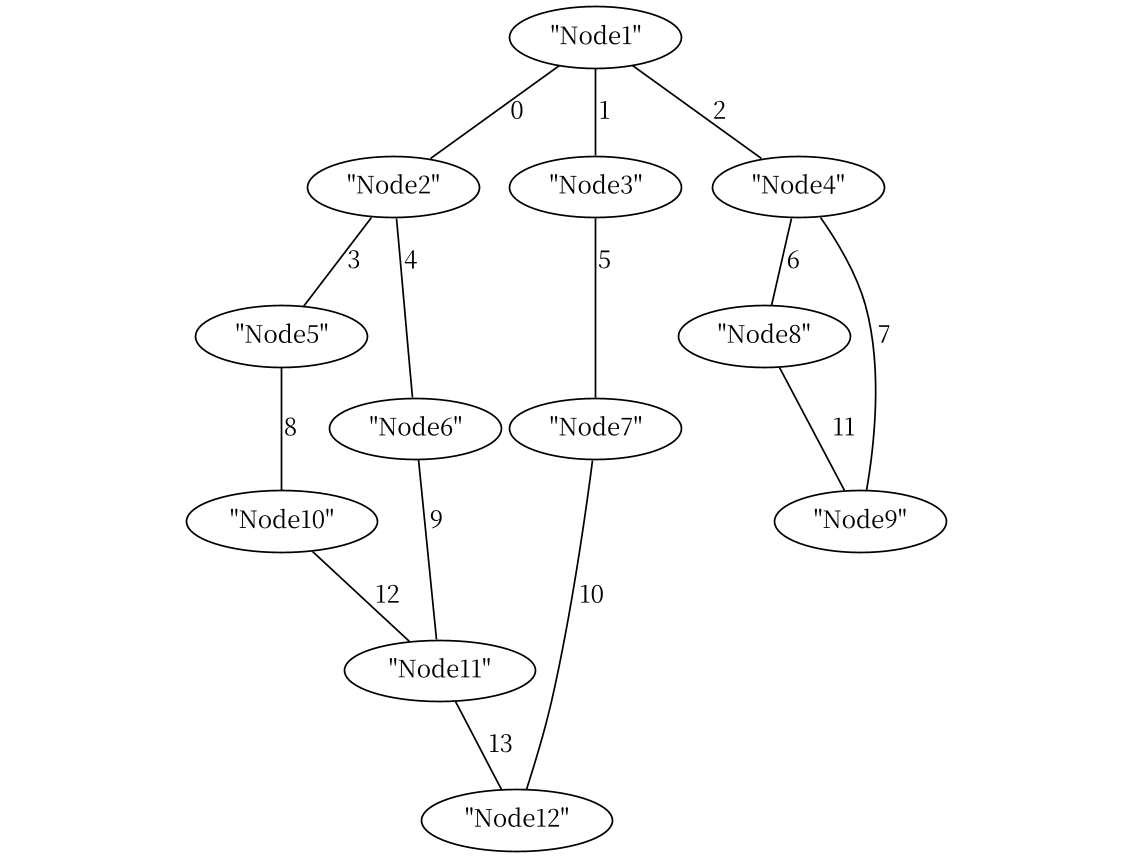
可以安装一个
dot文件预览插件,可以帮助我们更好的处理图的结构。
使用下面的代码导出文件为dot文件。
1 | let dot_output = Dot::with_config(&graph, &[Config::EdgeIndexLabel]); |
完整代码如:
1 | use std::fs::File; |
2.2 DiGraph有向图
有向图DiGraph派生于Graph,与Graph大同小异,其定义如下:
1 | pub type DiGraph<N, E, Ix = DefaultIx> = Graph<N, E, Directed, Ix>; |
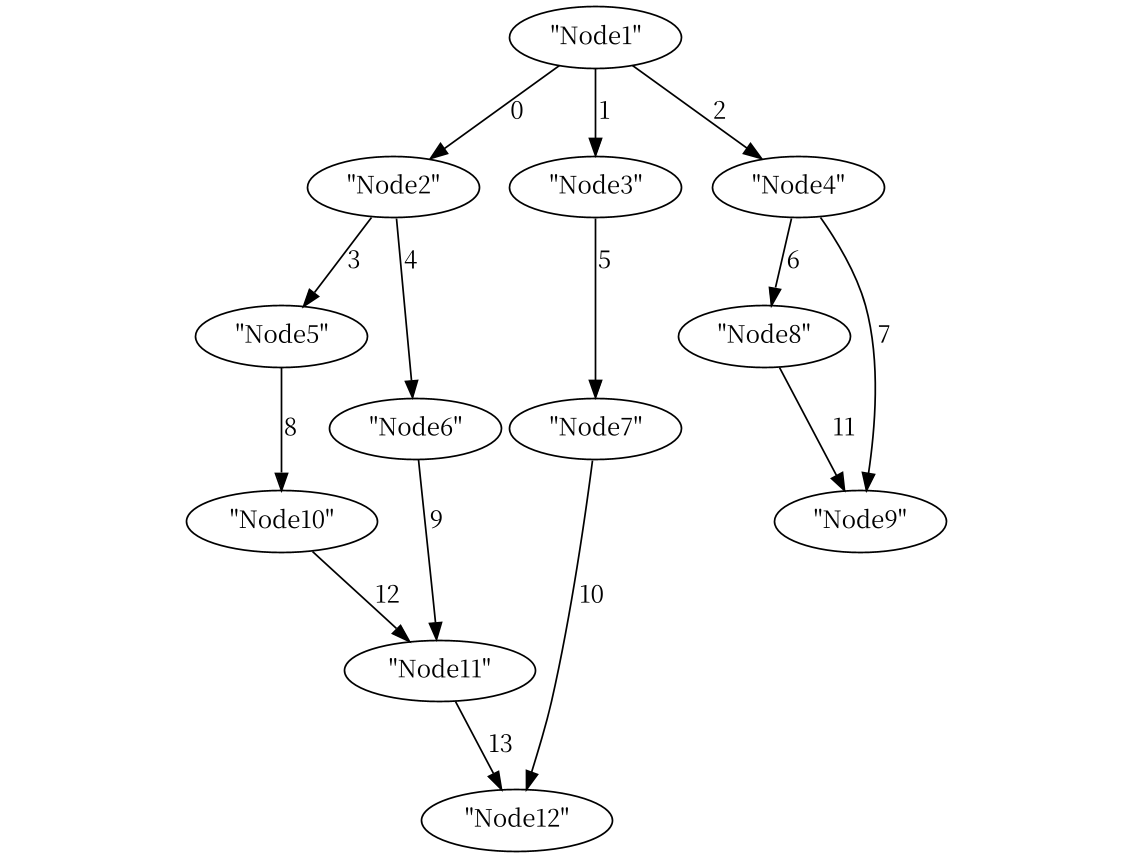
具体有向图的创建不再赘述,只给出实例化代码:
1 | let mut graph: DiGraph<&str, i32, u32> = DiGraph::new(); |
其结果输出为:
2.3 UnGraph无向图
同理,不在赘述。
2.4 StableGraph稳定图
与Graph类似,StableGraph背后的内存模型也是邻接表。删除节点或者分支时,不会改变其他节点或者分支的索引。其特性更适合频繁增添/删除边的逻辑算法,例如:生成树的构建、割集的计算、基本回路的计算等等。
其定义如下:
1 | pub struct StableGraph<N, E, Ty = Directed, Ix = DefaultIx> { |
同样,对于StableGraph,也有有向图和无向图的相应派生:
pub type StableDiGraph<N, E, Ix = DefaultIx> = StableGraph<N, E, Directed, Ix>;pub type StableUnGraph<N, E, Ix = DefaultIx> = StableGraph<N, E, Undirected, Ix>;
3. 算法
3.1 最小生成树算法
1 | pub fn min_spanning_tree<G>(g: G) -> MinSpanningTree<G> |
计算图的最小生成树。输入图被视为无向图。使用Kruskal算法。实际上返回的是最小生成森林,即图每个连通分量的一个最小生成树。
示例代码:
1 | let mst = min_spanning_tree(&graph); |
其输出结果如下:
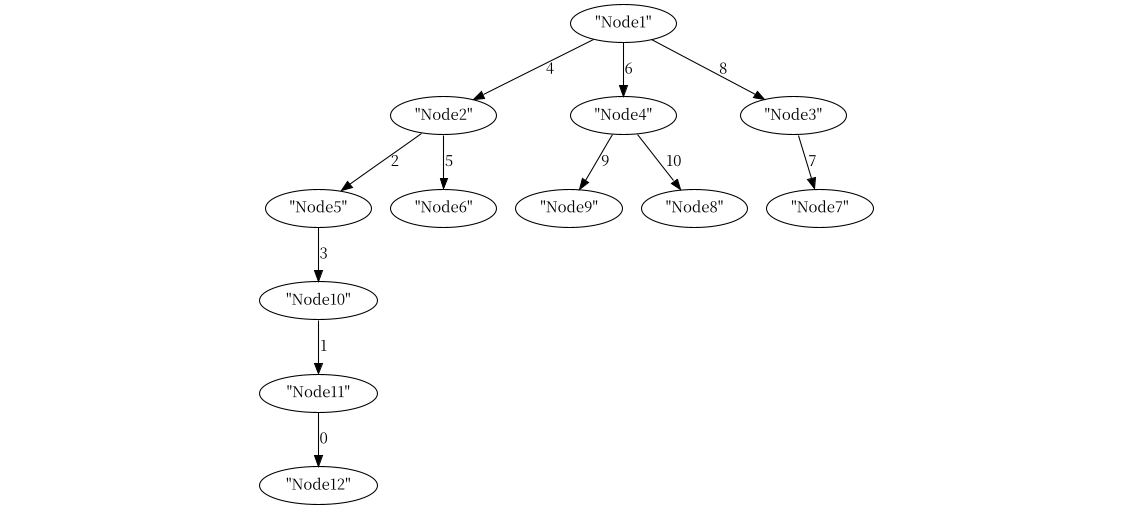
输出结果不同?这是由于
tree.add_node(name);添加节点时改变了节点索引。所以在进行最小生成树生成时最好对原图节点和分支进行clone,并使用StableGraph去掉连枝,以维持稳定性(如果需要的话)。也可以选择只clone节点,但是生成树的分支索引都是不可信的。
3.2 最短路径算法
Petgraph实现的最短路径算法有dijkstra算法、astar算法和BellmanFord算法等等。其中,dijkstra算法并不返回路径,而是返回一个Map,它包含了起始节点到每一个可达节点的最短路径成本。BellmanFord算法使dijkstra算法支持负权重。
我使用astar算法求解最短路径。
其实现代码如下:
1 | let result = astar( |
其路径path是路径节点的索引集合。
3.3 强连通分量
Petgraph使用Kosaraju算法计算强连通分量。对于无向图来说,计算的就是连通分量。通过迭代计算,对节点进行两次遍历。
其实现代码如下:
1 | let scc = kosaraju_scc(&tree); |
其中,每一个Group都是一个连通分量,是连通分量节点的索引集合。
3.4 遍历算法
3.4.1 深度优先算法DFS
深度优先需要用到petgraph::visit::Dfs,其简单实现如下:
1 | use petgraph::visit::Dfs; |
输出结果为:
1 | [0] 0 1 2 3 4 |
3.4.2 广度优先算法BFS
广度优先需要用到petgraph::visit::Bfs,用法跟广度优先一样,只需要将Dfs替换成Bfs即可,其实现如下:
1 | use petgraph::visit::Bfs; |
输出结果为:
1 | [0] 0 3 2 1 4 |
3.4.3 后序深度优先算法DfsPostOrder
有时我们可能需要先迭代节点的邻居,然后是节点本身。petgraph为这种遍历顺序提供了DfsPostOrder。使用方式与深度遍历相同:
1 | use petgraph::visit::DfsPostOrder; |
输出结果为:
1 | [0] 1 2 4 3 0 |
3.5 其他算法
除了寻路算法,petgraph还有很多其他算法,这里简单列举一些常用的算法:
all_simple_paths: 返回给定节点上所有路径的迭代器。condensation: 将每个强连接节点归并到一个节点。connected_components:返回连通节点数。has_path_connecting:如果两个节点间存在连通路径则返回True。is_cyclic_directed:如果图中包含至少一个有向环则返回True。is_cyclic_undirected: 如果图中包含至少一个环则返回。tarjan_scc:用Tarjan算法返回强连通分量向量。dominators:实现支配节点算法,用于计算图中某个节点的支配节点,通常应用于编译器分析和控制流图。feedback_arc_set:实现反馈弧集算法,用于找到并移除最少数量的边,使得图中没有循环(在有向图中应用)。floyd_warshall:实现Floyd-Warshall算法,用于计算图中所有节点对的最短路径,适用于稠密图(即边数量较多的图)。ford_fulkerson:实现Ford-Fulkerson算法,用于解决最大流问题,通过增广路径寻找图中的最大流量。isomorphism:实现同构算法,用于检测两个图是否是同构的(即结构上相同)。k_shortest_path:实现K-最短路径算法,用于寻找图中从源节点到目标节点的K条最短路径。matching:实现匹配算法,用于在图中寻找最大匹配或完美匹配,广泛应用于图的二分图匹配问题。page_rank:实现PageRank算法,用于对图中的节点进行排序,最初由谷歌提出,用于网页排名。simple_paths:提供与简单路径相关的算法,例如寻找图中两点之间的所有简单路径(不重复经过同一个节点的路径)。tred:实现拓扑排序算法,用于对有向无环图(DAG)中的节点进行线性排序,广泛用于依赖关系解析、任务调度等场景。
petgraph并没有实现寻找回路的算法,可以拆解为寻找路径的算法曲线实现。
4. 参考文献
[1] Jarodyv. (2023, February 21). Rust机器学习之petgraph. CSDN. https://blog.csdn.net/jarodyv/article/details/128796914
[2] Petgraph Developers. (2024). Petgraph library for Rust. GitHub. https://github.com/petgraph/petgraph